
Previously we reported on how the asteroid sample-return spacecraft Hayabusa2 was finally within range of its target to get a slightly-less blurred look of the surface features. In this article, we’re going to take a look at the close-up images that are being beamed back even as we speak.
JAXA’s Hayabusa2 mission involves intercepting an asteroid with the main mothership (Hayabusa2 itself), before dispatching four hopper robots to the surface. These little rovers hop around thanks to the small reaction wheel mechanisms within them (the sudden torque produced by the fast stopping and starting of the reaction wheels gives the rovers a small jolt, which is more than sufficient to allow the rover to hop in the small gravity of the asteroid).
The rovers, combined with observations from the mothership, allow the team at JAXA to determine the best location to deploy their impactor device. The impactor will form a crater, allowing fresh material to be collected for samples, to be sent back to Earth.
Do take a moment to subscribe to our email newsletter here. We will not sell your email address to a third party, and you can unsubscribe anytime.
To date, three hoppers have been released so far, with the most recent (MASCOT) being deployed last week. Let us head to asteroid 162173 Ryugu and get up to speed on what’s happening.
MINERVA II Update
The first hopper package, dubbed MINERVA II, is split into two different payloads, comprised of 3 separate hopper robots. Two of these hoppers (Rover-1A and Rover-1B) were successfully deployed to asteroid Ryugu’s surface on 21st September. You can see the first payload pod containing the first wave of landers in the image below.
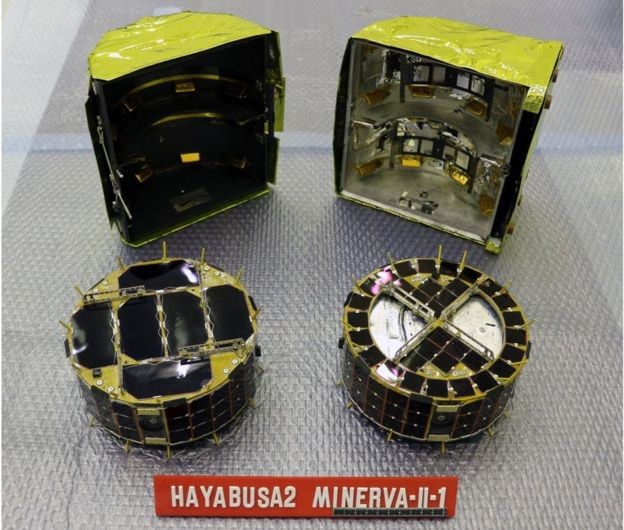
The image above is newly released by JAXA and shows a little bit more detail than was previously available. Note the spines protruding from the cylindrical rovers – these are temperature probes which allowed the rovers to measure the temperature of Ryugu’s surface wherever they happened to land.
Along with the detailed still images of Ryugu, the first MINERVA II deployment also allowed for the team at JAXA to capture video footage from the surface, marking the first time in history that video has been recorded on an asteroid.
And given that the little robots are equipped with stereoscopic cameras, perhaps we can expect to see some 360 degree 3D stills soon.
The second MINERVA II deployment (named as “Rover 2” although technically the third rover in MINERVA II and the fourth to be deployed from Hayabusa 2) will take place early next year according to JAXA. The rovers of MINERVA II are all equipped with solar panels, so they will be providing data for some time to come yet.
“I cannot find words to express how happy I am that we were able to realize mobile exploration on the surface of an asteroid,” said Yuichi Tsuda, Hayabusa2 Project Manager. “I am proud that Hayabusa2 was able to contribute to the creation of this technology for a new method of space exploration by surface movement on small bodies.”
MASCOT Update
In addition to MINERVA II, there was another rover present on Hayabusa2 named MASCOT, that was developed by DLR (the German space agency) in cooperation with CNES (France) and JAXA.
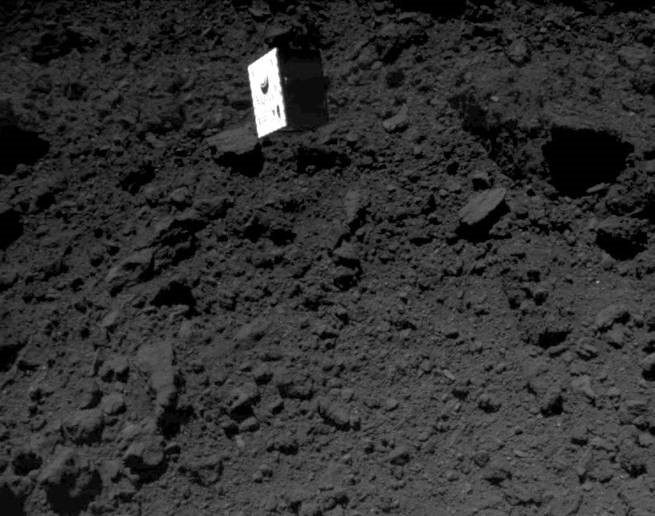
MASCOT was successfully deployed on 3rd October, and performed its short 17-hour mission, according to a press conference at IAC 2018 in Bremen. During the conference, DLR released images of the mission, showing MASCOT’s descent and also images from the surface.
Unlike the rovers of MINERVA II, which can recharge power via their solar panels, the toaster-sized MASCOT was equipped with only a battery and no means to recharge. The mission was expected to last for 16 hours, so at least they managed to squeeze an extra hour out of it.
During those 17 hours, MASCOT performed 3 hops over the period of 3 asteroid days and 2 asteroid nights (1 asteroid day/night cycle being equal to about 7 hours and 36 minutes).
MASCOT took a series of measurements at each site from its suite of instruments. These measurements have been carried out by camera, a radiometer, a magnetometer and a hyperspectral microscope. DLR has confirmed that the data recorded by MASCOT was successfully transmitted to Hayabusa2 before it finally perished. From there, the data was sent back to JAXA Control Centre in Sagamihara and then directly to the DLR Microgravity User Support Center (MUSC) in Cologne.
The results from these experiments will help MASCOT carry out its main objective, provide ground details to Hayabusa2 itself, and to confirm readings taken from the orbiter. To use remote sensing parlance, MASCOT is/was on a ground-truthing mission.
In addition, the information from MASCOT will provide up-close reconnaissance to scientists with the optimum sample selection sites for when the main spacecraft finally goes in to collect the samples from the impactor crater site.
It was announced at IAC 2018 that JAXA, CNES and DLR were so happy with the mission, that they released a joint statement announcing future collaboration on the MMX (Martian Moons eXploration) mission, scheduled for launch in 2024.
Part of the statement read:
“In the light of this success, JAXA, CNES, and DLR jointly declare their wish to cooperate on the MMX (Martian Moons eXploration) mission as follows: MMX is a JAXA led mission to explore Martian moons, Phobos and Deimos, aiming for observation, landing, and sample return. JAXA, CNES, and DLR have agreed that the rover onboard MMX would be developed through French-German collaboration”.
What’s Next (for Ryugu)?
It may be over for MASCOT, but there is still plenty of work remaining before Hayabusa2 is ready to collect its priceless sample.

According to JAXA, November and December will see a period of solar conjunction, as the Sun will be in between Earth and Hayabusa2, blocking communications to the asteroid. The spacecraft will continue to perform some functions automatically during this period.
In January 2019, Hayabusa2 will commence medium altitude (5km) observations of Ryugu, before deploying the explosive small carry-on impactor (SCI) in March-April.
Sometime after that, Hayabusa2 will itself “fly” into the crater and collect the samples created by the impactor. This is the key part of the mission, and no doubt operations engineers at JAXA will be on the edges of their seats. Again, we’re hoping for some great images from that event if possible.
Tentatively scheduled for July 2019, the final MINERVA II rover (rover 2) will be deployed, and Hayabusa2 will begin the return to Earth around November-December 2019.





